|
Телефоны:
8 (495) 974-72-53 8 (965) 212-20-94 8 (905) 519-54-84 8 (910) 413-58-77  
Контроллер управления вентиляцией «КУВ – 10М»

Принцип работы
контроллера управления вентиляцией КУВ-10М
КУВ-10М может управлять мощностью вентиляторов по различным алгоритмам, которые задает пользователь в зависимости от поставленной задачи. Рассмотрим несколько примеров применения этого прибора.
|
|
|
|
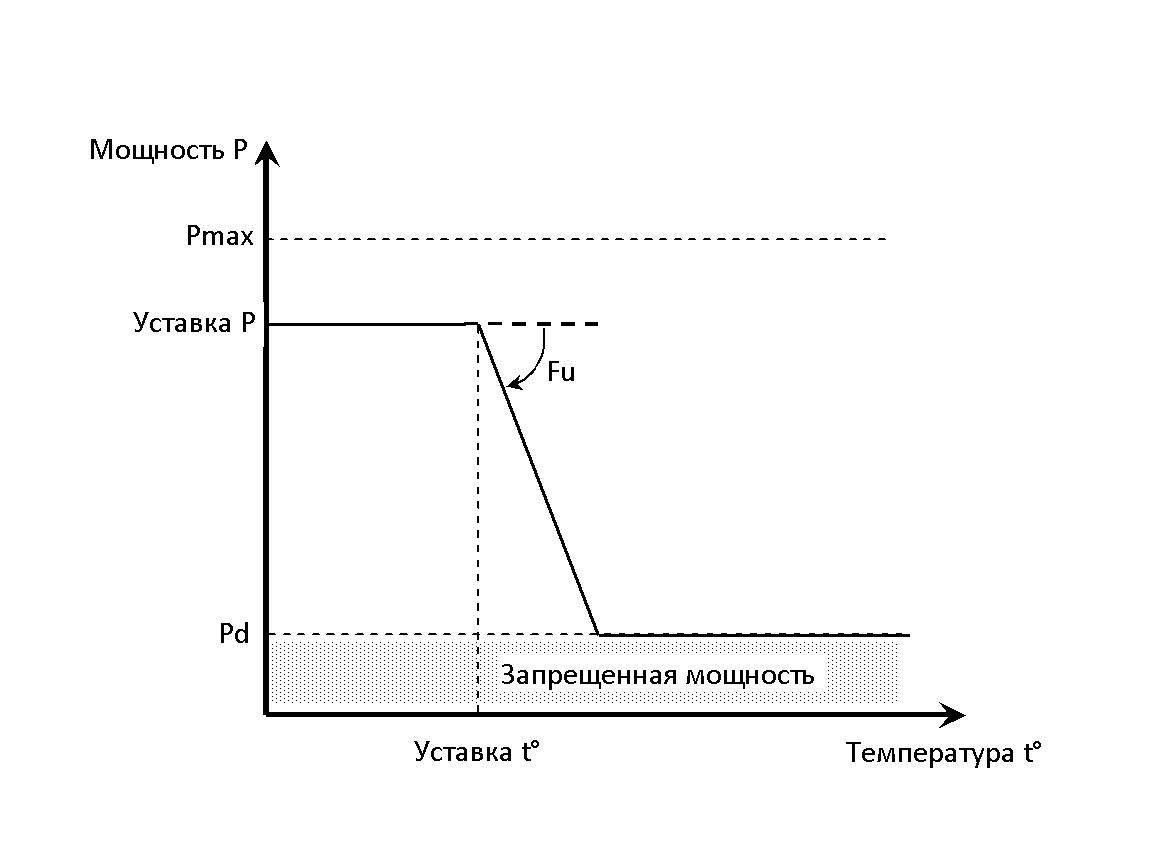
Рис 1. |
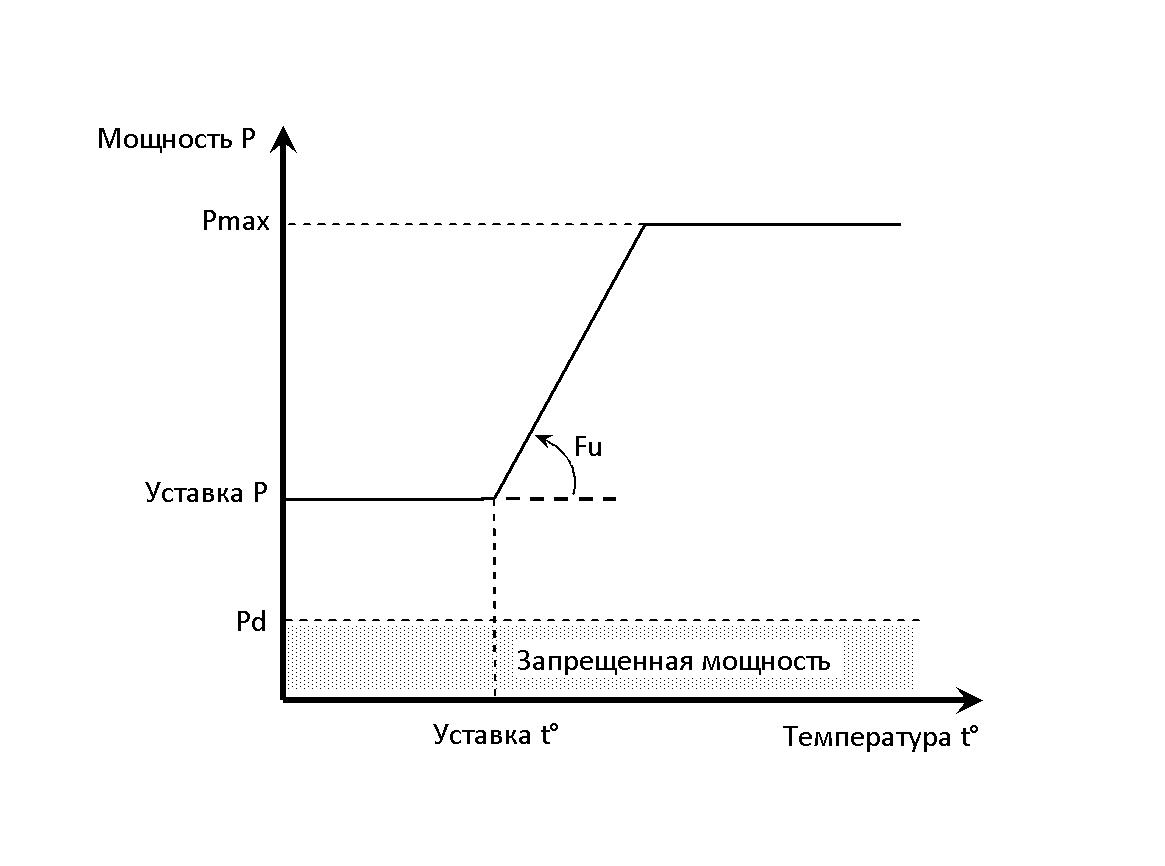
Рис 2. |
1. Управление обогревом здания
При обогреве калорифером, для управления вентилятором калорифера применяют КУВ-10М. Регулирование потребляемого объектом тепла происходит как показано на Рис.1. В этом случае уставкой Р является максимальное разрешенное потребление тепла данным объектом. Когда температура в помещениях превысит уставку t°, потребление тепла начнет пропорционально сокращаться за счет уменьшения мощности вентилятора. Коэффициент пропорции задается переменной Fu. Имеющиеся в контроллере реле можно использовать для оповещения о неполадках и для управления теплоносителем, например с помощью электроклапана. Переменной Pd задаем минимальную мощность, при которой вентилятор начинает уверенно работать.
2. Управление вентиляцией
КУВ-10М применяется в системах вентиляции жилых и производственных помещениях, в животноводстве и птицеводстве. В этом случае процесс управления показывает Рис.2.
Переменная Pd как и в первом случае, задает минимально допустимую мощность, при которой могут работать вентиляторы.
Уставка Р задает минимально необходимый воздухообмен в помещении (цехе, птичнике).
Если температура воздуха в помещении превысит уставку t°, произойдет увеличение мощности вентиляции и соответственно воздухообмена, пропорционально росту температуры.
Коэффициент пропорции задает переменная Fu.
Такой способ управления позволяет удовлетворить практически любые требования к поведению вентиляции.
В контроллере имеются программируемые реле. С их помощью можно организовать включение до пяти дополнительных групп вентиляторов, которые будут последовательно включаться при превышении температуры на заданное число градусов. Например при повышении
температуры над заданной на каждый градус, включится каждая следующая группа вентиляторов.
Таким образом прибор может управлять вентиляцией с любой мощностью. Это особенно актуально при организации туннельной вентиляции птичников с использованием торцевых вентиляторов большой мощности летом, и различные экономные схемы для вентиляции в зимний период.
Программируемые реле также можно использовать;
-для управления обогревателями,
-для оповещения о различных неполадках и отклонениях в работе системы вентиляции.
ПАСПОРТ >>>>
Особенности работы симисторных регуляторов мощности асинхронных двигателей.
1. Зачем нужен нулевой провод
При типовом включении трёхфазного двигателя соединённом звездой, при симметричной нагрузке, ток по нулевому проводу не течёт. В этом случае часто применяют схему включения электродвигателей без нулевого провода (Рис.1)

Рис.1
Для регулирования мощности асинхронных двигателей с помощью симисторных регуляторов, обычно используется фазовый метод регулирования (иногда в сочетании с другими алгоритмами). В этом случае возникает ситуация, когда при больших углах отсечки, межфазные токи отсутствуют. Это наглядно демонстрирует рисунок 2. В нижней части рисунка показана ситуация когда при включённом симисторе любой одной фазы, обе других оказываются выключенными. Другими словами включение фаз не перекрывается по времени и межфазного тока нет.
Рис.2
Поэтому все симисторные регуляторы для нормальной работы требуют подключения двигателей с нулевым проводом (Рис. 3)
Рис.3
В этом случае при больших углах отсечки, ток от каждой из включённых фаз протекает по нулевому проводу.
Контроллеры управления вентиляцией линейки КУВ для правильной работы и защиты оборудования анализируют ток в нулевом проводе. Результаты такого анализа позволяют выявить три возможных ситуации:
1 – нормальный режим, (в нулевом проводе присутствуют токи от коммутации всех трёх фаз)
2 – обрыв фазы (отсутствие токов от одной или двух фаз)
3 – отсутствие нулевого провода (полное отсутствие токов нагрузки в нулевом проводе)
При очень малой мощности нагрузки защита работать не сможет. Если суммарная мощность подключённых двигателей менее 2% от максимальной мощности (менее 200 Вт.), отключите защиту.
2. Скольжение
Характерной особенностью асинхронного двигателя является несинхронное (асинхронное) вращение его ротора с магнитным полем статора. Поэтому такой двигатель и назвали – асинхронный.
Отставание частоты вращения ротора от частоты вращения магнитного поля статора называют скольжением. В общем случае, чем меньше мощность двигателя, тем выше его скольжение. Кроме этого, существуют и специальные электродвигатели с повышенным скольжением.
Для работы с симисторными регуляторами мощности подходят асинхронные двигатели с повышенным скольжением. Это почти все двигатели мощностью до 0.37 кВт включительно. Они допускают большой диапазон регулирования мощности. Он показан зелёной и желтой стрелками на Рис. 4. Более мощные двигатели будут иметь более узкий диапазон регулирования мощности (зелёная стрелка на Рис. 4) и повышенный нагрев. Применять такие двигатели нежелательно.
Рис. 4
3. Как регулируется мощность
Механически нагруженный электродвигатель совершает работу и отдаёт механическую мощность. Для совершения этой работы он потребляет от сети электрическую мощность.
При искусственном ограничении потребляемой электрической мощности, падает отдаваемая механическая мощность и уменьшаются обороты двигателя. Двигатель при этом начинает работать на участке повышенного скольжения Рис.4. Соответственно, при отсутствии механической нагрузки регулирования мощности не будет.
Существует предел уменьшения подаваемой электрической мощности, ниже которого скольжение становится недопустимо большим и растёт нагрев двигателя. Этот запрещённый диапазон показан красной стрелкой на Рис.4. Минимально-допустимая мощность, подаваемая на двигатели зависит от типа применяемых двигателей и характера их нагрузки. Она должна определяться при монтаже системы управления путём длительных тестовых прогонов с контролированием температуры двигателей. Найденное значение минимально допустимой мощности заносится в контроллер КУВ. Это гарантирует, что двигатели никогда не будут работать на опасном участке с недопустимо большим скольжением.
| 




 ГЛАВНАЯ
ГЛАВНАЯ

 Каталог производимой нами продукции
Каталог производимой нами продукции